这几年人工智能火爆,近期也因为项目的原因开始接触机器学习。目前学的是强化学习,为了对学
过的知识进行整理总结,准备以博客的形式写出来,主要内容是David Silver的公开课。限于水平如有错误欢迎指正!
强化学习(Reinforcement Learning)也叫增强学习,是一种机器学习方法。有一种机器
学习分类是把学习算法分为三种:监督学习、无监督学习和强化学习。不同于监督学习,强化学习没有标签数据,只有一种叫reward(奖励)的标量信号评价动作的好坏,所以强化学习看起来很另类。
这一节先讲述基本概念。
强化学习概念
reward
reward译为“奖励”,是个体采取行动后环境的一个反馈。reward为强化学习设定一个目标:问题的解决可被描述为最大化累积奖励。
agent
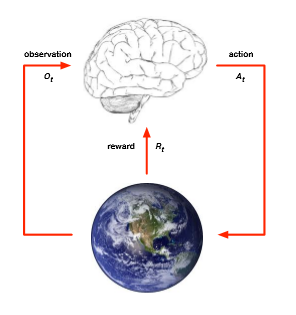
agent即“个体”,相当于机器人、游戏中的主角。在RL中个体可以对环境进行观察,决策出行动,随后获得一个从环境返回的奖励。
environment
也就是环境。顾名思义,它就是相当于游戏中除主角之外的地图、怪物等集合。环境接收个体动作之后,对本身信息进行更新(也就是一个交互),并返回个体一个奖励。个体与环境的交互图如下:
state
译为“状态”,是历史信息的函数,包含所有已有的信息。根据客体的不同状态分为三种:环境状态、个体状态和信息状态。环境状态是环境所有的信息,对于个体来说有可观测和部分可观测之别。可观测就是个体知道环境的所有信息,相当于开启上帝视角。部分可观测指个体只了解环境的部分信息,相当于从人类的视角去探索。
个体状态是个体可利用的所有信息,是个体历史信息的函数。
信息状态比较概念化,目前对它一知半解。
马尔科夫性
然后讲讲马尔科夫性,这是RL重要的一个思想基础,但是平时基本不会注意到它(因为太基础了)。
 上面的条件概率等式的言外之意就是未来状态只取决于当前,与过去的所有信息无关!
上面的条件概率等式的言外之意就是未来状态只取决于当前,与过去的所有信息无关!
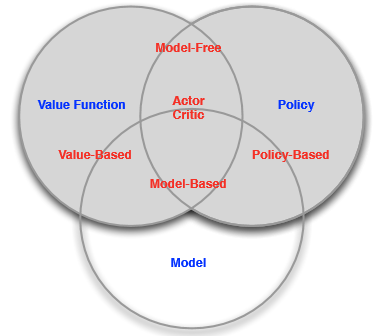
强化学习大部分情况下都是在训练个体,个体的组成也是重要的概念。一般来说个体由三部分组成:
policy:译为“策略”,是状态到动作的函数:
 value function:价值函数,是评价状态的一个指标。具体为未来奖励的期望值,即:
value function:价值函数,是评价状态的一个指标。具体为未来奖励的期望值,即:
 model:是个体对环境的建模,我的理解是相当于人类对环境的认知建模,主要包括状态转移概率:
model:是个体对环境的建模,我的理解是相当于人类对环境的认知建模,主要包括状态转移概率:
![]() 和奖励:
和奖励:

强化学习的分类
根据个体是否建立模型可分为model-based和model-free两大类,之后将会学习到还能进一步分类;根据使用的指标分为value-vased、policy-based和actor-critic.